Werken met GPS-data
GPS-receivers voor duiven zijn al enige tijd op de mark, met wisselend succes. Het is pas de laatste tijd dat deze technologie ver genoeg gevorderd is om toepasbaar te zijn op duiven; dat wil zeggen, klein genoeg en licht genoeg, met minimale hinder voor de duif.
Op het internet en in de meer wetenschappelijke literatuur zijn reeds tal van artikels te vinden over dit fenomeen; het spreekt vanzelf dat deze apparaten het meest werden getest op reisduiven, maar i.v.m. met andere vliegduiven is mij weinig of niets bekend. Over tipplers en boedapester hoogvliegers vindt je veel beweringen over vliegduur en vlieghoogte, maar goede metingen ontbreken of zijn misschien door de jaren heen verloren gegaan.
Begin 2010 besloot ik zelf enkele apparaatjes aan te schaffen; op het internet vond ik toen twee leveranciers en tegen april kon ik aan de slag. Deze leveranciers bestaan niet meer, maar GPS apparatuur is nu ook voorradig als ring; zie see Skyleader.
Hoe werkt het?
het apparaat bestaat uit een batterij, een GPS-module voor de metingen, en geheugen om de gegevens op te slaan tijdens de vlucht. Voor de vlucht wordt het op de rug van de duif bevestigd en geactiveerd; tijdens de vlucht worden positie en hoogte geregistreerd in het geheugen van het apparaat, met een vooraf bepaald interval; dit kan variëren van 1 seconde tot 3 minuten. Na de vlucht wordt het apparaat verwijderd en worden de gegevens gedownload op de pc met een bijgeleverd programma. Dit gebeurt via een USB kabel en een software programma dat op de pc wordt geïnstalleerd.
Naar gelang de leverancier worden de gegevens in verschillende formaten aangeleverd.
Bij Pigeontrack (niet meer op de markt in 2021) krijg je na downloaden op de pc een .KML bestand dat je kunt opladen in Google Earth; in Google Earth kun je dan het afgelegde traject bekijken, en voor elk meetpunt zijn er detailgegevens. Het apparaat komt uit de US, dus alle maten worden getoond in feet en mph.
- Hoogte, breedtegraad en lengtegraad
- snelheid (in feet)
- tijdstip
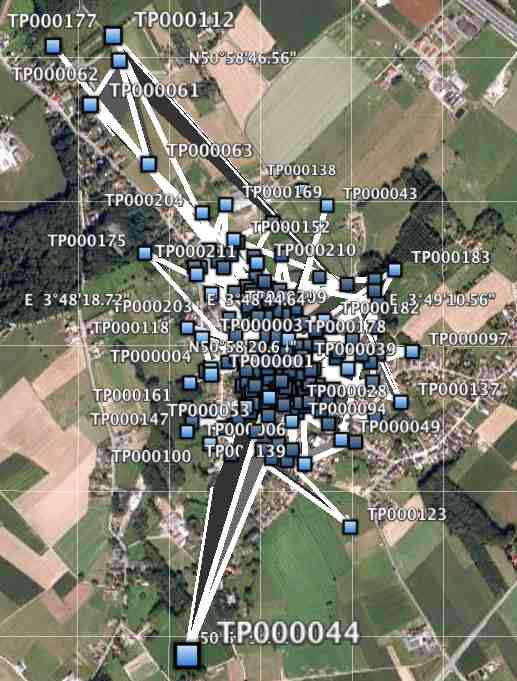
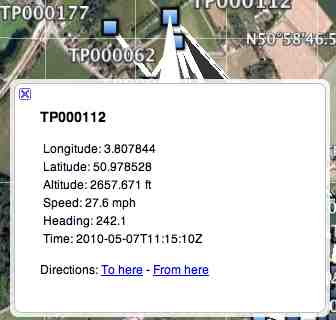
Een PigeonTrack KML bestand in Google Earth ziet er uit zoals afgebeeld in foto 1. Bij dit voorbeeld zit er een halve minuut tussen elk meetpunt. De meetpunten zijn verbonden met een lijn die het traject aanduidt. Bij een interval van een halve minuut krijgt men een hoekig verloop omdat de duiven rondjes vliegen en de meetpunten met een rechte lijn worden verbonden. Ieder punt is oplopend genummerd. Door te klikken op een punt krijgt men een overzicht van de gegevens die op die plaats zijn opgemeten zoals geïllustreerd in foto 2
Het apparaat bestaat uit een batterij, een GPS-module voor de metingen, en geheugen om de gegevens op te slaan. Voor de vlucht wordt het op de rug van de duif bevestigd en geactiveerd; tijdens de vlucht worden positie en hoogte geregistreerd, met een vooraf bepaald interval; dit kan variëren van 1 seconde tot 3 minuten. Na de vlucht wordt het apparaat verwijderd en worden de gegevens gedownload op de pc met een bijgeleverd programma. Dit gebeurt via een bijgeleverde kabel en een software programma dat op de pc wordt geïnstalleerd.
Naar gelang de leverancier worden de gegevens in verschillende formaten aangeleverd.
Bij Pigeontrack.com krijg je na downloaden op de pc een .KML bestand dat je kunt opladen in Google Earth; in Google Earth kun je dan het afgelegde traject bekijken, en voor elk meetpunt zijn er detailgegevens. Het apparaat komt uit de US, dus alle maten worden getoond in feet en mph.
- Hoogte, breedtegraad en lengtegraad
- snelheid (in feet)
- tijdstip
|
foto 1: Google Earth screenshot van een PigeonTrack KML bestand |
|
Bij TechnoSmArt (Italiaanse firma) kreeg je de gegevens onder verschillende formaten aangeleverd.
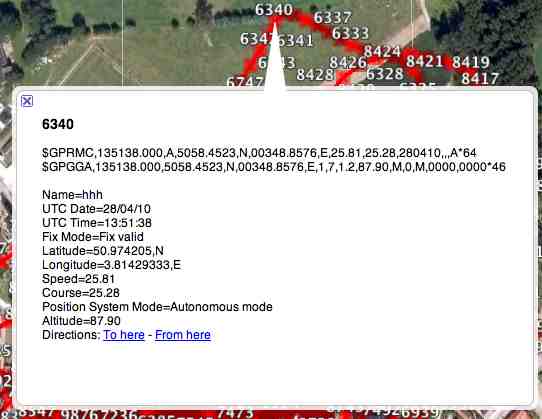
Vooreerst is er een tekst bestand met primitieve GPS-gegevens, geformatteerd volgen het NMEA-formaat; deze gegevens zijn vrij onleesbaar en moet je dan zelf interpreteren, waarbij enige kennis over GPS-data registratie noodzakelijk is.
Wens je de vlucht-gegevens te bekijken in Google Earth dan zal het programma de basisgegevens converteren naar een kml-bestand.
Tenslotte levert TechnoSmArt ook een programma om de gegevens te converteren naar een tekst-bestand (*.TXT) dat gemakkelijk kan worden ingeladen in een rekenprogramma.
Het apparaat bevestigen op de duif

foto 5: gareel zoals meegeleverd door PigeonTrack

Foto 6: Duif met dummy gps aangebracht met een gareel
Volgens de voorschriften van de leveranciers zijn er twee methodes. Bij Pigeontrack wordt een "gareel" meegeleverd, te vergelijken met de bevestiging van een rugzak ( foto 5). Dit gareel schuif je over de kop en de vleugels, zodat op de plaats van de "rugzak" een velcro strip zit waarop je dan het apparaat kan bevestigen . Het is de bedoeling dat dit eerst een week wordt gedragen in het hok met een vervang-gewicht, alvorens de duif los te laten met het echte ding. Deze methode werd in het begin uitgetest met tipplers. De duif heeft er op het eerste zicht weinig last van en negeert het volledig. Dat viel nogal tegen; alhoewel de geselecteerde duiven zeer betrouwbaar zijn zag je na enkele uren dat het enthousiasme eraf was en dat zij (een duivin) vroeger naar beneden kwam; een ander exemplaar, ook zeer betrouwbaar, ging ergens zitten, iets wat ze voorheen nooit gedaan had.
De tweede methode (foto 6) komt van TechnoSmArt maar vraagt iets meer werk. Op de rug van de duif worden de pluimen over een strook van 3 op 5 cm kortgeknipt tot ongeveer 1 cm lang. Vervolgens wordt met een lederlijm een velcro strip aangebracht. Het kortknippen van de pluimen verbetert de aanhechting van de strip en voorkomt dat het apparaat te veel kan bewegen tijdens de vlucht. Deze methode werkt zeer goed en de prestaties lijden er niet onder. Tegen de rui komt de strip los en valt uiteindelijk af omdat hij enkel op de pluimen is gelijmd en niet op de huid. TechnoSmArt raadt aan om geen lijm te gebruiken op basis van cyano-acrylaat.
Verwerking van de gegevens
Zelf de basisgegevens verwerken uit het basis-bestand (*.nme of *.nmea) is geen sinecure. Je moet wel wat studeren op GPS-technologie en de manier waarop gegevens worden bewaard.
Vooreerst wordt alles genoteerd in UTC-tijd (Coordinated Uiversal Time); In de praktijk komt het erop neer dat je deze moet converteren om uit te komen bij de lokale tijd (in België) rekening houdend met de tijds-zone en winter-en zomeruur.
De hoogte-notering gebeurt in meters (althans met het apparaat van TechnoSmArt) maar hier moet ook een correctie worden op toegepast. Hoe het juist werkt heb ik nog niet helemaal door, maar hoogte-metingen worden gedaan tegenover een hypothetisch zeeniveau dat overeenkomt met de zogenaamde "Geoid". Volgens Google Earth ligt mijn hok ligt op 30 m boven de zeespiegel. Als ik het apparaat op het hok leg zou dit dus 33 meter moeten noteren maar dat is niet zo; het noteert 70 m. Daarom zijn alle hoogtes gecorrigeerd met 70 m, met als "eikpunt" het duivenhok.
De afstandsberekening tussen twee opeenvolgende gps-fixes (de meetpunten) moet je berekenen op basis van de gps-coordinaten die genoteerd worden in lengte- en breedte-graden (radialen). Die waarden moet je dan via een formule converteren naar een afstand; er zijn verschillende methodes maar voor deze metingen werd gebruik gemaakt van de "Haversine formula". Deze formule wordt gebruikt voor de berekening van de totaal gevlogen afstand, en om te bepalen hoever elk meetpunt van het hok ligt.
GPS en Tipplers
Click op de figuur hierboven om te openen.
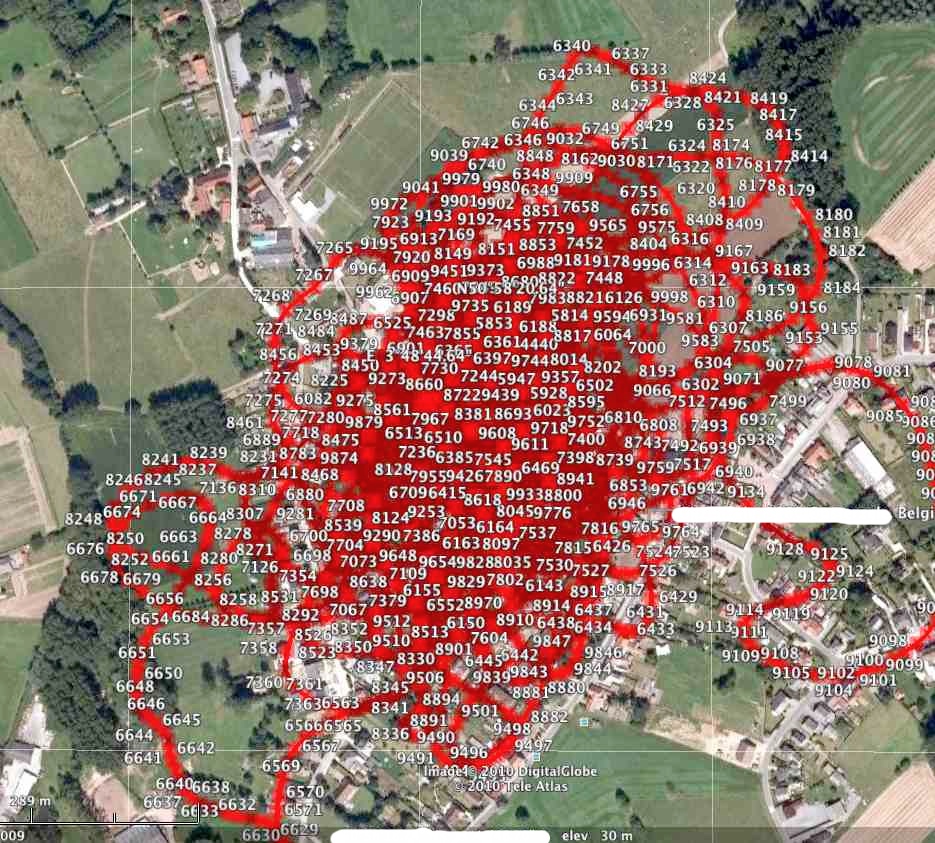
Foto 6 is een registratie van een tippler-vlucht. Vroeger dacht ik dat het vliegteam veel verder van het hok ging. Uit de metingen blijkt dat de dieren meestal niet verder gaan dan 500 à 700 m; de verste punten komen dikwijls overeen met een waarneembare grens zoals een bomenrij of een grote weg. Met een meetinterval van 1 seconde overlappen veel punten elkaar en dicht bij het hok wordt het onoverzichtelijk. De verste trajecten zijn duidelijk te herkennen.
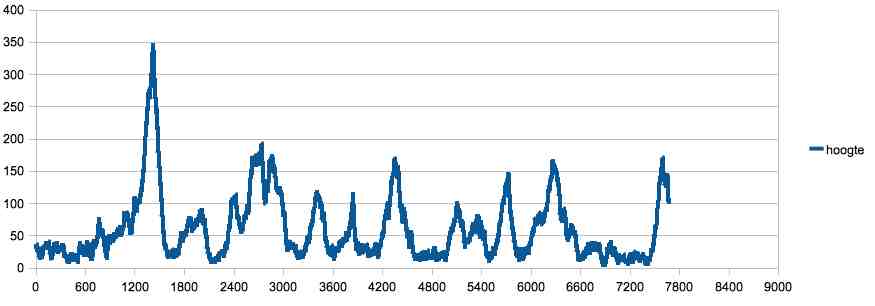
De hoogte van deze vlucht vertoont regelmatig enkele uitschieters richting 200 m. De meeste kilometers spelen zich af beneden de 100 m. Uiteraard hangt dit ook af van het ras en de klimaatsomstandigheden. Een typisch hoogteverloop wordt geïllustreerd in figuur 1; opmerkelijk is wel dat er een zekere regelmaat in zit.
De vlucht van 28 april vertoont enkel interessante gegevens. Gelost om 7:00, verlopen de eerste twee uur rustig en op geringe hoogte, steeds in de buurt van het hok. Dan wordt het traject grilliger: ze gaan afwisselend in de hoogte en de rondjes worden groter, met een maximale afstand van 700 m van het hok. Opvallend is wel dat de hoogteverschillen samenvallen met een grotere rondjes (de afstand van het hok wordt groter), alsof ze plots veel actiever worden. De vlucht eindigt rond 16 uur. Tijdens deze vlucht van 9 uur werd er 290 km afgelegd.
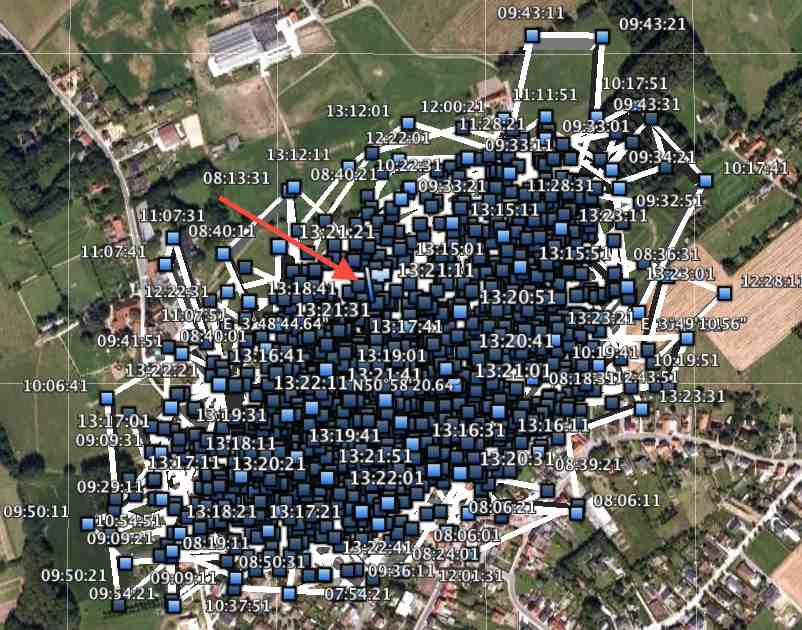
Figuur 3 toont het verloop van een vlucht op 7 juni; de vlucht duurde 10:26 minuten en er werd in totaal 249 KM afgelegd. Dit kun je bestempelen als een typische tipplervlucht met een regelmatige jojo beweging qua hoogte. De maximale afstand van het hok liep op tot 600 m. In Google Earth ( foto 7 ) zie je een hoekig verloop van de vlucht omdat de meetpunten werden opgenomen met een interval van 10 seconden. De rode pijl duidt de ligging aan van het hok (vlag).
GPS en boedapester hoogvliegers
Begin 2010 had ik maar één duiver die niet in de kweek zat; alle metingen gebeurden dus met dit exemplaar, dat ik zelf niet als de beste inschat van mijn hok (de andere zaten immers in de kweek). Het betreft een laat jong van 2009 dat tijdens de metingen telkens het gezelschap had van jongen duiven 2010. Het experiment met de budapester is geëindigd begin juni omdat hij, samen met enkele andere, tijdens een zeer hoge vlucht verloren is gevlogen en niet meer teruggekeerd. Nooit iets van gehoord, alhoewel hij voorzien was van een naamring met gsm-nummer.
GPS-data: overzicht 2010
| Datum | Interval (sec) | duur | totale afstand (km) | max. snelheid (km/u) | gemiddelde snelheid | hoogste punt (m) | max. afstand van hok (m) | aantal metingen |
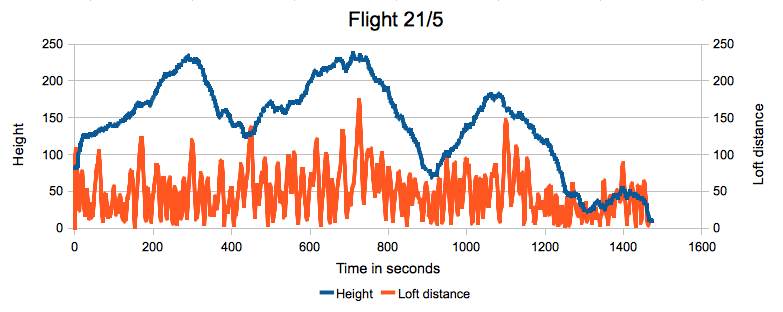
| 21/5 | 1 | 00:44 | 17.15 | 62.26 | 23.39 | 236 | 170 | 2630 |
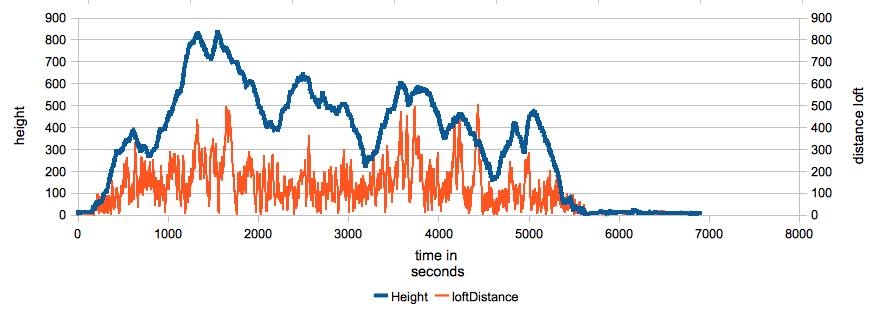
| 22/5 | 1 | 01:52 | 73.2 | 80.43 | 39.21 | 833 | 500 | 6770 |
| 23/5 | 1 | 02:15 | 91.3 | 72.47 | 40.58 | 583 | 1220 | 8122 |
| 24/5 | 1 | 01:34 | 45.22 | 75.82 | 28.87 | 329 | 330 | 5691 |
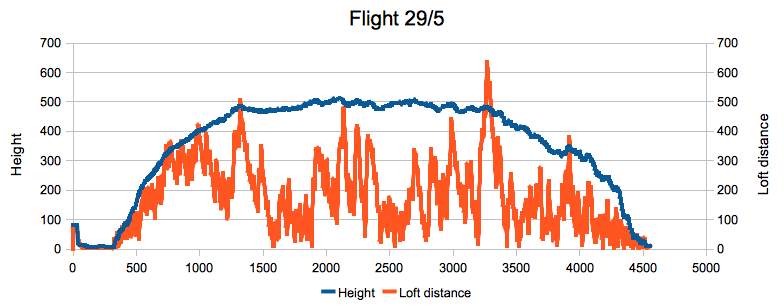
| 29/5 | 1 | 01:41 | 45:93 | 82.84 | 27.29 | 512 | 630 | 6069 |
| 3/6 | 15 | 00:36 | 9.19 | 71.23 | 15.32 | 204 | 310 | 602 |
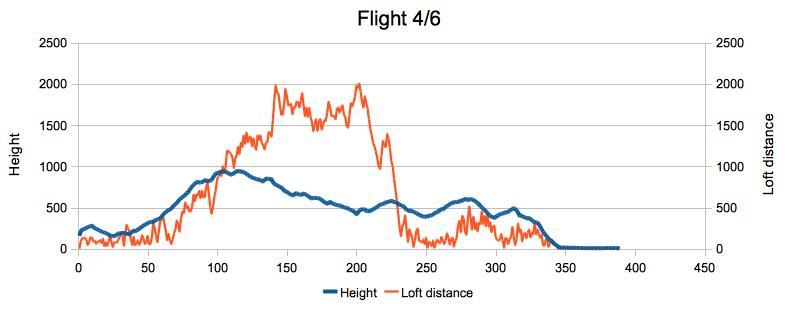
| 4/6 | 10 | 01:04 | 41.62 | 96 | 38.78 | 941.5 | 2000 | 389 |
| 5/6 | 10 | 00:26 | 7.43 | 59.24 | 17.15 | 279.49 | 210 | 159 |
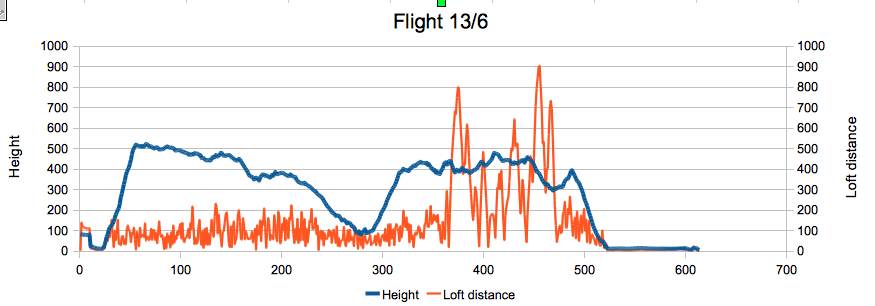
| 13/6 | 10 | 01:42 | 51.62 | 81.08 | 30.36 | 520 | 900 | 614 |
| 22/6 | 10 | 00:31 | 8.71 | 71.97 | 16.87 | 236 | 290 | 192 |
| 23/6 | 10 | 02:00 | 30.31 | 59.76 | 15.16 | 424 | 590 | 726 |
Bovenstaande tabel geeft een lijst van alle metingen gedaan in 2010. De cijfers zijn iets minder correct dan de tippler-metingen omdat ik met boedapesters minder gedisciplineerd omga. Na de vlucht blijven ze nogal eens op het dak zitten ipv direct in het hok te gaan en dat vervalst de gemiddelden. Er zit dus wat ruis op maar die stilstaande fases heb ik getracht eruit te filteren met een zelf ontwikkeld software programma. Samenvattend kan ik stellen dat de prestaties ondermaats zijn in vergelijking tot de kwaliteit van de duiven. Mits aangepaste training en voeding valt er zeker veel meer uit te halen maar tijdens deze periode van het seizoen heeft de training van tipplers voorrang. Even een toelichting over de opgemeten waarden:
- Interval: aantal seconden tussen elke meting; 1 seconde is zeker teveel; 5 à 10 seconden tussen elke meting lijkt mij ideaal.
- duur: in uren:minuten; duur van de vlucht, vanaf het begin van de meting tot de landing.
- totale afstand gevlogen tijdens de vlucht. Minder foutmarge bij een meting met klein interval
- maximale snelheid geconstateerd tijden de vlucht
- gemiddelde snelheid: hier zit nogal wat variatie in; waarschijnlijk zitten hier enkele stilstaande fases in waarbij ze nog op het dak blijven zitten achter de landing, alhoewel ik getracht heb deze gegevens uit te filteren.
- hoogste punt: uiteraard een belangrijk punt bij hoogvliegers. Hangt samen met de training en conditie, en ook door het feit dat veel vluchten afgelegd werden samen met jonge dieren. De hoogste meting is 940 m en dat is al indrukwekkend; ik ben ervan overtuigd dat sommige vluchten nog hoger gaan. Valt te bevestigen volgend seizoen !
- maximale afstand tot het hok: dit is de afstand gemeten in rechte lijn van het meetpunt tot het hok.
- Er bestaat dikwijls een verband tussen deze afstand en de hoogte waarop ze vliegen. Het verste punt bevindt zich op 2 km en dat is tamelijk veel in vergelijking tot tipplers. Boedapesters moeten dus een beter navigatievermogen hebben dan tipplers, anders geraak je alles kwijt.
GPS data: details
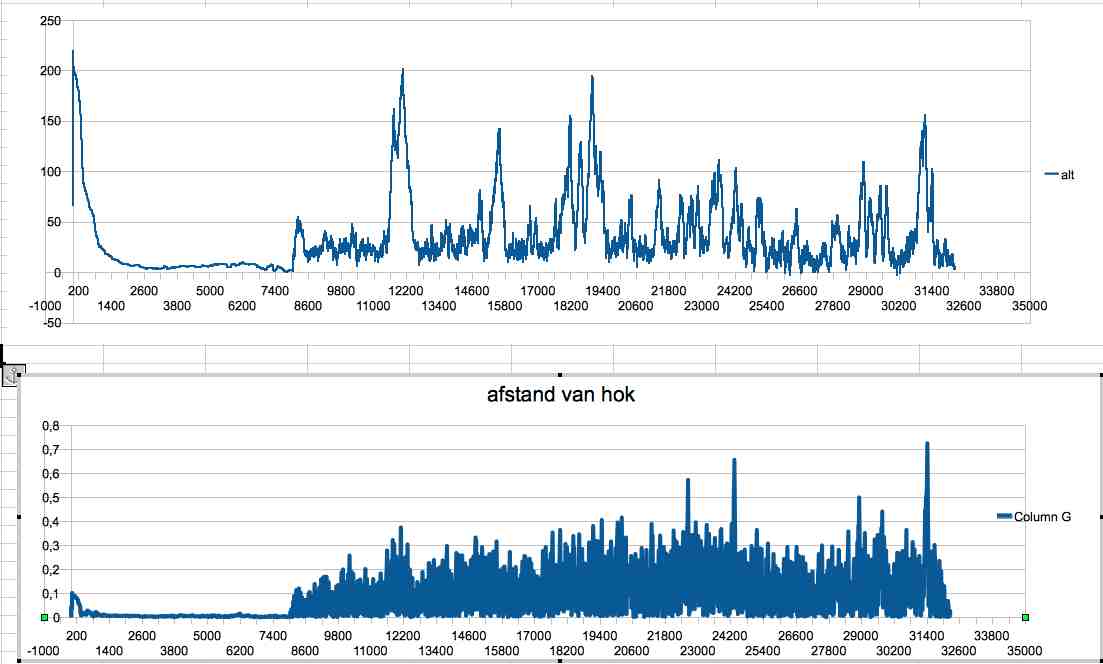
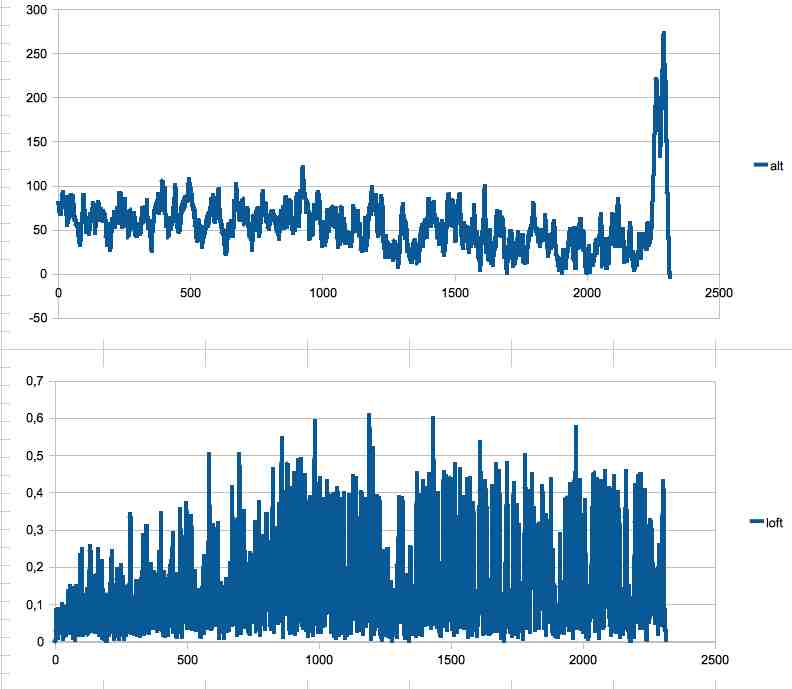
Laten we eens ingaan op de details van enkele vluchten. De blauwe lijn geeft het verloop van de hoogte (linker Y-as). De afstand van het hok wordt geïllustreerd door de rode lijn (Y-as aan rechterzijde). Wanneer de rode lijn op 0 staat betekent dit dat de duif in de omgeving van het hok is.
simulatie van vluchten
Grafieken zeggen niet alles. Ze geven een idee over de dynamiek van de vlucht maar niet over het verloop van het traject. Hieronder zijn twee filmpjes geplaatst met het verloop van het traject in Google Earth. De vlucht start aan het hok. De vierkante markeringen zijn de meetpunten (om de seconde bij de eerste vlucht, om de tien seconden bij de tweede). De meetpunten zijn door een verticale lijn verbonden met de grond om een beter inzicht te geven over de positie van het meetpunt.
Hieronder de vlucht van 22 mei met een maximale hoogte van 833 m en een maximale afstand tot het hok van 500 m. De meetpunten werden geregistreerd met een interval van 1 seconde; dit resulteert in een zeer vloeiende beweging van de vlucht.
De tweede vlucht werd geregistreerd op 4 juni en had een maximale hoogte van 941 m; ze gingen tot 2 km ver van het hok wat naar mijn aanvoelen zeer ver is voor dit soort duiven. De meetpunten werden genomen om de 10 seconden en dit resulteert in een minder duidelijk traject.